Robots d'inspection pour conduites ou réservoirs sous pression
Dans le cadre du projet Smart Tooling, des robots d'inspection ont été mis au point pour les installations en service et celles à l'arrêt.
Inspection entièrement automatique dans les pipelines
Les racleurs peuvent inspecter les grandes canalisations horizontales entre les sites pour y détecter la corrosion. Toutefois, ils ne peuvent pas être utilisés dans les systèmes de canalisations sur site de plus petit diamètre, qui présentent toutes sortes de coudes et se déploient à la fois horizontalement et verticalement. De plus, ces conduits sont souvent situés en hauteur, ce qui rend l'inspection manuelle coûteuse. C'est pourquoi ExRobotics et l'Universiteit Twente ont développé le Snakebot. Comme un serpent, il se glisse à l'intérieur des tuyaux pour effectuer des inspections internes. Le robot mesure un demi-mètre de long et est conçu pour inspecter des canalisations d'un diamètre de 6 à 8 pouces.

"Pour notre prototype, nous nous sommes d'abord penchés sur la mobilité, avec des capteurs pour un mouvement autonome. Le robot peut monter verticalement, prendre des virages à angle droit et ramper à travers des vannes ouvertes. Le triangle avant et arrière du robot s'appuie alternativement contre la paroi du tuyau et c'est ainsi que vous obtenez le mouvement", explique Iwan de Waard d'ExRobotics. Le système de commande a également été abordé. "Lors de l'inspection, les conduits sont hors d'usage, mais pas nécessairement propres. Si le Snakebot rencontre des résidus d'huile, les roues peuvent déraper. Le logiciel enregistre alors une distance parcourue plus grande, ce qui fausse la localisation de l'appareil. Nous devons donc prévoir un système davantage pourvu d'intelligence, tout en conservant le format petit et léger du robot. C'est un grand défi", selon Nicolò Botteghi, doctorant à l'Universiteit Twente. Les mesures réelles de l'épaisseur des parois sont destinées à un projet de suivi, tout comme l'interface utilisateur pour l'inspecteur.
L'objectif des outils intelligents : permettre au personnel de maintenance de l'industrie process d'effectuer son travail de manière plus sûre et plus efficace, ou en d'autres termes, plus intelligente, à l'avenir.
Inspection des citernes et réservoirs sous pression remplis de liquide
Toutefois, l'industrie de transformation est également demandeuse de solutions pour l''inspection automatique en cours de fonctionnement, c'est-à-dire sans temps d'arrêt, par exemple dans les cuves sous pression. Une telle méthode d'inspection, dans un liquide stationnaire et à une chaleur extrême ou à une pression élevée, n'était pas imaginable jusqu'à présent. "Nous avons développé une boule d'inspection : un robot dans une boule roulante transparente qui peut supporter des températures jusqu'à 80 °C et des pressions jusqu'à 4 bars. Le robot lui-même assure la locomotion, comme un hamster dans sa roue, tandis que l'enveloppe en plastique protège le matériel à l'intérieur de la boule. Toutefois, ce matériel peut être adapté en fonction du revêtement de conduite et des conditions environnementales. En raison de sa forme universelle, la boule peut être utilisée dans différentes parties du processus, même en cas d'expositoin à des condensats ou à des sédiments par exemple", explique Ferry van der Valk de ID-Tec.
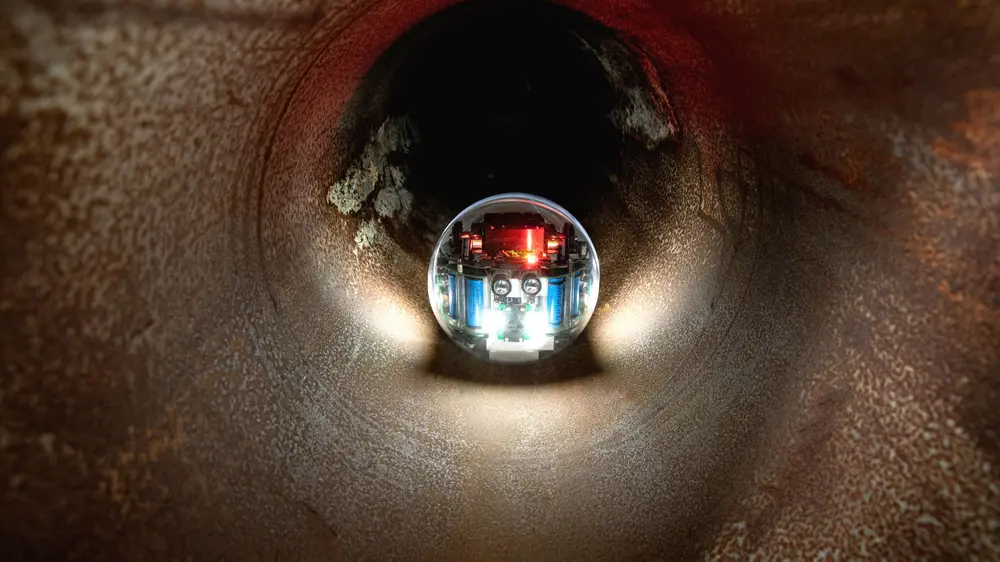
La boule abrite des capteurs visuels pour l'inspection proprement dite et la reconnaissance ultérieure des images, mais aussi des moteurs et une batterie pour l'entraînement. Un groupe de travail spécialisé de l'UGent a contribué à solutionner trois défis : l'autonomie, dans un liquide et dans un réservoir ou un conduit métallique. À terme, les données pourraient être transmises par communication ultrasonique, qui sera également utilisée dans une étape ultérieure pour la navigation et la localisation de la boule. L'utilisation de l'IA, pour que le robot lui-même puisse identifier un mécanisme de dommage comme la corrosion, pourrait venir compléter le développement de ce projet.
