Cobot ondersteunt lasser, maar vervangt die niet
Optimalisatie is letterlijk en figuurlijk spelen met de configuratie
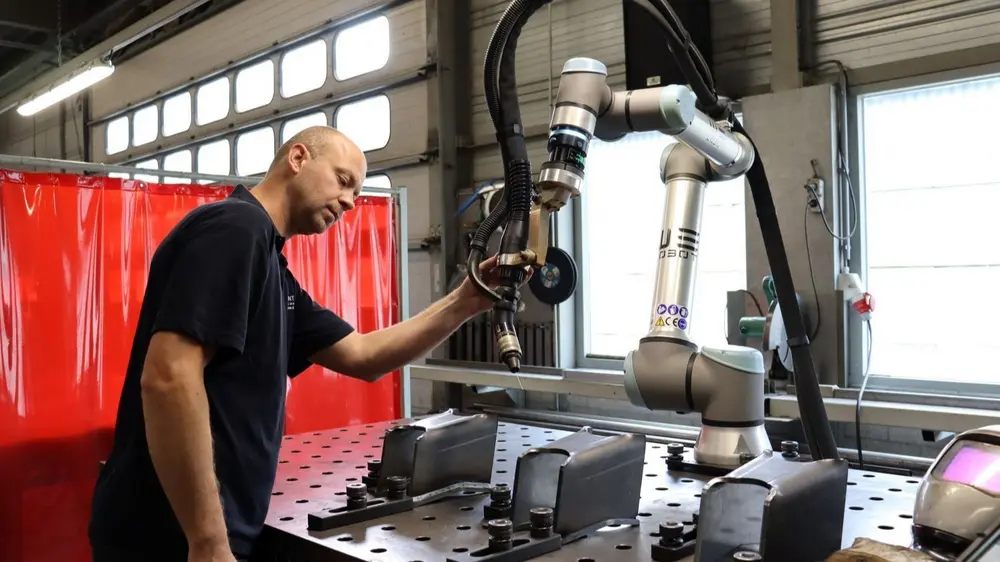
Lascobots zijn voor de metaalsector bijzonder interessant. Niet alleen omdat mens en machine veilig naast en met elkaar kunnen werken, maar ook omdat ze relatief eenvoudig te programmeren en schaalbaar zijn. Door de combinatie van geavanceerde machinecapaciteit en menselijk vernuft worden de processen dynamischer en efficiënter. Wel hebben lassers – en dan met name de oudere garde − tijd nodig om te wennen aan de samenwerking, al verandert de perceptie van wantrouwen naar waardering.
Breed inzetbaar
Dat cobots steeds prominenter vertegenwoordigd zijn binnen de proces- en maakindustrie, heeft niet alleen te maken met het feit dat ze veilig kunnen (samen)werken met/naast mensen, maar ook met de eenvoud van programmeren. Ook de metaalindustrie laat zich op dat punt niet onbetuigd: daar worden cobots onder meer gebruikt voor kwaliteitscontrole en meting, machinebelading en ontlading, en technieken als snijden, afbramen en lassen.
Hun flexibiliteit ten aanzien van wisselende productieorders maakt ze voor de metaalsector extra interessant, evenals het feit dat zowel de hardware als de software eenvoudig zijn aan te passen en uit te breiden (schaalbaar concept). Alvorens daar verder op in te gaan, geven we eerst een korte 'opfriscursus' cobotica.
Cobotica
Cobotica − een samentrekking van 'collaboratieve robotica' − is een technologisch vakgebied dat is ontstaan uit een krachtenbundeling van disciplines als:
- human-robot interaction (HRI), een vakgebied dat onderzoekt hoe mensen en robots effectief en veilig kunnen samenwerken, met daarbij aandacht voor ergonomie, veiligheid en communicatie;
- informatica/kunstmatige intelligentie, om cobots hun omgeving te laten ‘begrijpen’ en dankzij software, machine learning en computer vision adaptief te laten handelen;
- mechatronica – een combinatie van werktuigbouwkunde, elektronica en informatica – die het mogelijk maakt slimme machines te bouwen die nauwkeurig kunnen bewegen en reageren;
- robotica, voor de ontwikkeling van de mechanische en elektronische onderdelen als actuatoren, motoren en grijpers;
- sensortechnologie, gericht op het waarnemen van de omgeving met behulp van beeld-, afstands- en en/of krachtsensoren, met als doel een veilige mens/machine-interactie.
Setting
Robots zijn over het algemeen geschikt voor processen die worden gekenmerkt door hoge volumes en hoge snelheden, dus met een hoog repetitief karakter. Cobots zijn ontworpen om veilig in de nabijheid van mensen te (kunnen) opereren. De combinatie van geavanceerde machinecapaciteit en menselijk vernuft maakt de processen dynamischer en efficiënter.

In principe verrichten lasrobots en -cobots dezelfde werkzaamheden:
- het uitvoeren van lasbewerkingen met technieken als MIG/MAG, TIG, plasma-, laser- punt- en booglassen;
- lasnaad vinden en volgen;
- het verlichten van het fysieke werk van de lasser en het verhogen van de productiviteit;
- automatisering van het lasproces teneinde efficiëntie, kwaliteit, output en repliceerbaarheid daarvan te verbeteren/optimaliseren.
Hoewel de werkzaamheden dus vergelijkbaar zijn, zijn de setting waarin en de condities waaronder duidelijk verschillend; zie de tabel.

Programmering
Bij een lasrobot bepaalt de programmastructuur wanneer en op welke wijze welke actie dient te worden uitgevoerd. De robot voert deze acties autonoom en blind uit, zonder interactie of aanpassing tijdens het proces (hardcoded gedrag).
Bij een lascobot daarentegen wordt de lasapparatuur zo aangestuurd dat deze niet in een 'automatische' follow-upmodus zit. De cobot kan adaptief reageren indien nodig, bijvoorbeeld door forcefeedback. Daarbij wordt krachtgevoelige terugkoppeling gebruikt om continu te kunnen vaststellen hoeveel kracht of druk er op de cobot wordt uitgeoefend.
Deze forcefeedback is te gebruiken om:
- lasposities letterlijk met de hand (hand-guided) in te geven, door de cobot in de juiste positie te ‘kneden’;
- op verzoek de positie van een product af te tasten, dat wil zeggen het object(oppervlak) te onderzoeken/scannen en dit vaak met behulp van tactiele of krachtgevoelige sensoren;
- in geval van een onverwachte aanraking schade of letsel te voorkomen.
Dergelijke feedback helpt de lascobot nauwkeuriger, consistenter en veiliger te lassen, vooral in situaties waarin de positie van het werkstuk of de lasnaad niet exact bekend is.
Lassers hebben tijd nodig om te wennen aan de samenwerking met een machine, maar vrijwel altijd blijkt die samenwerking uiteindelijk een vruchtbare te zijn
Gebruiksgemak
Lascobots − doorgaans plug-and-playsystemen − zijn dankzij vooraf ingestelde en geoptimaliseerde parameters in staat om nauwkeurig repeterende bewegingen te maken. Omdat geavanceerde programmeervaardigheden niet nodig zijn, is de apparatuur ook toegankelijk voor niet-technisch personeel.
De intuïtieve software stelt de operator in staat om snel nieuwe lasprogramma’s aan te maken: hij/zij kan de lascobot manueel door de gewenste lasbaan leiden en vervolgens met één druk op de knop de posities en/of bewegingen opslaan (single button teaching). Een dergelijke snelle omstelling is met name bij kleine series van belang en vermindert stilstand (downtime).

Een lascobot is in de regel kleiner, lichter en mobieler dan een traditionele lasrobot. Daardoor kan deze eenvoudig worden verplaatst naar verschillende werkstations, is er geen vaste installatie/fundatie vereist en ook geen perimetrische afscherming (hekwerk of kooiconstructie). Bovendien is er verhoudingsgewijs weinig vloeroppervlak nodig.
Ook integratie in bestaande productielijnen is mogelijk zonder al te grote aanpassingen. Juist ook vanwege hun mobiliteit zijn cobots op verschillende werkplekken inzetbaar, in tegenstelling tot een lasrobot. Dat maakt ze ideaal voor snel veranderende omstandigheden en groot laswerk.
Filteronderhoud
Filters beschermen gevoelige onderdelen zoals sensoren en lenzen tegen fijne en agressieve deeltjes; inclusief metalen en chemische stoffen die gedurende het lasproces ontstaan. Al doende kunnen ze echter beschadigd en/of verzadigd raken. Onderschatting van de mate waarin en de snelheid waarmee dit gebeurt, is een veel gemaakte fout.
Periodiek onderhoud voorkomt problemen:
• visuele inspectie op vervuiling (stof, metaalslijpsel, lasrookdeeltjes), beschadigingen (scheurtjes, lekkages in het filterhuis) en tekenen van verzadiging (donkere verkleuring, verstoppingen);
• reiniging van grof- of voorfilters (niet alle filters zijn daarvoor geschikt; sommige moeten direct worden vervangen), verwijdering van stof- en lasdeeltjes met perslucht (indien toegestaan door fabrikant) of met een stofzuiger voorzien van het juiste industriële filter;
• controle van luchtdoorstroming en afzuigcapaciteit: een verminderde luchtstroom wijst vaak op een verzadigd/verstopt filter.
Vervanging vindt doorgaans plaats op basis van het aantal bedrijfsuren (fabrikantspecificaties), dan wel op basis van een drukverschilmeting: veel lascobots hebben tegenwoordig een ingebouwde sensor voor drukval over het filter.
Innovaties
Bij een toenemende vraag wordt er actief gewerkt aan een aanbod dat technisch en qua omvang toereikend is. De ene keer gaat het daarbij om een noviteit, de andere keer om verbetering van een reeds bestaand concept.
Geavanceerde veiligheidsfuncties
Voorbeelden daarvan zijn:
- dynamisch task-adjusted speed, waarbij de snelheid naargelang de taakomstandigheden flexibel wordt gereguleerd (minder kans op fouten/ongevallen);
- realtime botsdetectie, het realtime detecteren en herkennen van een onverwacht bots- of contactmoment met een object, persoon of machine;
- geofencing en toegangscontrole waarbij de robot automatisch uitschakelt wanneer een onbevoegde het werkgebied betreedt.
Gebruiksvriendelijke(re) programmering en AI-integratie
Voorbeelden daarvan zijn:
- 'teach-by-demonstration', een leermethode waarbij de operator de cobot handmatig een lasbeweging voordoet, waarna deze de beweging automatisch opslaat en herhaalt;
- het door AI-algoritmes zelfstandig aanpassen en optimaliseren van taken middels de realtime analyse van parameters als booglengte, positie en laskwaliteit.

Low-code/ no-code-programmering
Voorbeelden hiervan zijn:
- drag-and-drop interfaces: daarin kunnen laspatronen, bewegingen en cycli worden samengesteld door blokken te slepen en neer te zetten in plaats van door een code te schrijven;
- integratie met IoT en sensoren: via low-code platforms kunnen realtime data van lascobots en sensoren worden gekoppeld aan visuele apps die afwijkingen signaleren en daardoor een snelle interventie mogelijk maken.
Visionsystemen en 3D-camera-integratie
Deze stellen lascobots in staat nauwkeuriger te werken. Doordat de exacte positie en oriëntatie van het werkstuk bekend zijn, kunnen afwijkingen in maat, positie of vorm automatisch worden gecompenseerd. Ook is inspectie van de lasnaden tijdens of direct na het lassen mogelijk, waardoor defecten snel(ler) zijn op te sporen en aan te passen.
Verder leveren dergelijke systemen een bijdrage aan de veiligheid, vanwege hun mogelijkheid te monitoren op de aanwezigheid van mensen en/of obstakels in de werkomgeving.
Complicerende factoren
De afstemming van lasparameters en collaboratieve bewegingen kan complex zijn. In sommige gevallen vergt het een geavanceerde basisprogrammering en zijn er sensoren nodig die continu meten en bijsturen, en dan met name bij productafwijkingen of uiteenlopende toleranties. De in een lasomgeving gebruikelijke rook, vonken en reflecties kunnen die sensorwerking verstoren bij optische metingen. In combinatie met uv-straling en lasspatten vormt dit een extra uitdaging wat betreft de veilige mens/machine-interactie.
Omdat lascobots vaak minder krachtig en ook iets langzamer zijn dan lasrobots, zijn ze niet voor alle laswerkzaamheden geschikt, vooral niet als het gaat om zware of snelle lassingen.
En dan is er natuurlijk nog de factor mens. Verandering roept veelal weerstand op, zeker bij de wat oudere vakmensen die niet zelden bang zijn om hun baan te verliezen. Lassers hebben tijd nodig om te wennen aan de samenwerking met een machine, waarbij de twijfel of een cobot wel dezelfde kwaliteit kan leveren nooit ver weg is. Maar vrijwel altijd blijkt die samenwerking uiteindelijk een vruchtbare te zijn.
Met medewerking van Federatie Metaalplaat en WeCobot
