Werking ADAS staat of valt met kalibratie
Remote diagnose en standaardisatie helpen garagebedrijf
Advanced Driver Assistance Systems verminderen het risico op ongevallen en verbeteren de rijervaring van de bestuurder. De werking van het systeem staat of valt echter bij de wijze waarop de frontcamera's en -radars, de achteruitrijcamera's en de LIDAR-sensoren zijn gekalibreerd. Dit vergt een verzameling gespecialiseerde tools die niet elk garagebedrijf standaard in huis heeft. Naar verwachting zal de op handen zijnde standaardisatie een en ander voor fabrikant, garagehouders én consument een stuk eenvoudiger maken.

Rijhulpsystemen
Voor een enkeling zijn sommige van de onder de noemer Advanced Driver Assistance Systems (ADAS) werkende functionaliteiten een bron van ergernis, voor de meesten zijn ze een zegen. ADAS is ontworpen om de veiligheid en het gemak van bestuurders te verbeteren door te waarschuwen voor gevaren, rijtaken te ondersteunen en deze in sommige gevallen zelfs over te nemen. ADAS vermindert het risico op ongevallen en verbetert de rijervaring door de bestuurder in uiteenlopende verkeerssituaties assistentie te verlenen.
Werkingsprincipe
ADAS werkt doorgaans volgens een 'drietrapsraket': waarneming, gegevensverwerking en respons.
Waarneming
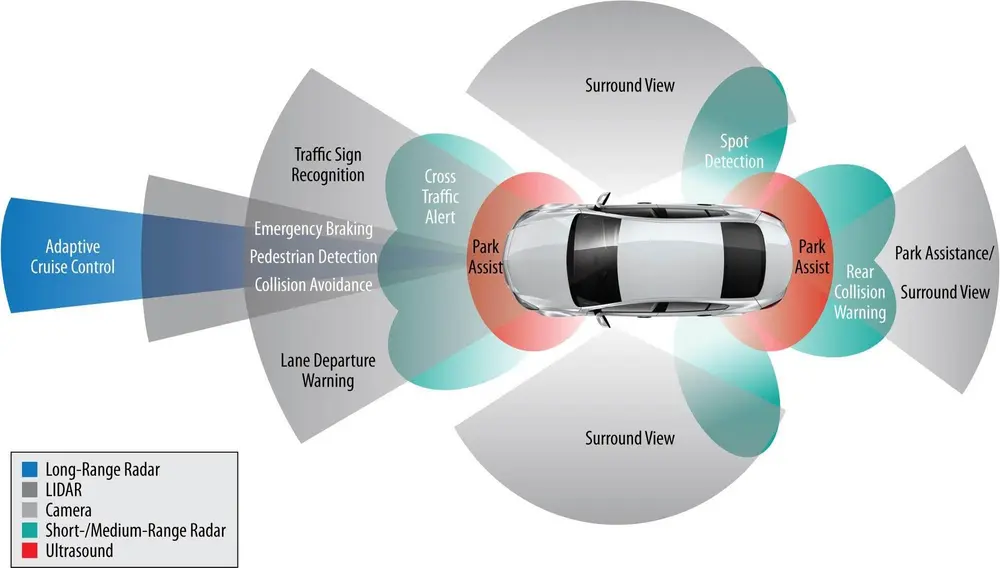
Hiervoor wordt gebruikgemaakt van camera's, radar en ultrasone sensoren, ingebouwd in verschillende delen van het voertuig. De camera's verzamelen gegevens inzake verkeersborden, rijstroken, obstakels en/of andere verkeersdeelnemers rondom het voertuig. Radar en LIDAR worden gebruikt om de afstand tot objecten als verkeersborden en rijstrookmarkeringen vast te stellen.

(foto: Metalced)
Gegevensverwerking
Boordcomputers analyseren de gegevens realtime en gebruiken die om risico's/gevaren te detecteren, bijvoorbeeld een dreigende aanrijding of een onbedoelde rijstrookwisseling. AI en machine learning worden vaak gebruikt om de nauwkeurigheid van deze analyse te verbeteren, vooral in complexere situaties als stadsverkeer.
Respons
Bij detectie van (potentieel) gevaar ontvangt de bestuurder een waarschuwing in de vorm van een geluidssignaal, een visuele dashboardmelding of trillingen in stuur of stoel. In sommige gevallen wordt de controle over bepaalde functies volledig overgenomen, onder meer bij Automatic Emergency Braking en bij Lane Keeping Assist.
De bekendste systemen
- Adaptive Cruise Control (ACC): past automatisch de rijsnelheid aan, zodat er een veilige afstand blijft bestaan tot de voorligger;
- Automatic Emergency Braking (AEB): detecteert obstakels/voertuigen voor de auto en remt automatisch af bij dreigend gevaar;
- Blind Spot Monitoring (BSM): waarschuwt de bestuurder als er een voertuig in de dode hoek van de auto zit;
- Driver Drowsiness Detection (DDA): herkent tekenen van vermoeidheid bij de bestuurder en probeert deze via waarschuwingssignalen ertoe te bewegen te pauzeren;
- Lane Keeping Assist (LKA): helpt via zachte stuurcorrecties de bestuurder de auto op de juiste rijbaan te houden;
- Park Assist Systems: deze helpen bij het inparkeren door sensoren die afstanden tot obstakels meten of door de auto volledig automatisch in te parkeren;
- Traffic Sign Recognition (TSR): 'leest' verkeersborden en toont deze aan de bestuurder.
Procedure
Voor een goed uitgevoerde kalibratie zijn gekwalificeerd personeel en de juiste apparatuur een must, temeer ook omdat de kalibratievereisten verschillen per fabrikant en zelfs per model.
Bij de kalibratie is een verzameling gespecialiseerde tools nodig om ADAS nauwkeurig te kunnen afstemmen en testen
Voorafgaand aan de kalibratie dient eerst te worden gecontroleerd of het voertuig goed is uitgelijnd. Zo niet, dan is kalibreren per definitie zinloos; een kalibratietoestel dat die check automatisch uitvoert verdient dan ook de voorkeur. Softwaregeleide positionering voorkomt de complexe en tijdrovende positionering met behulp van lasers en meters.

Wanneer kalibreren?
Kalibratie is aangewezen na:
- opgetreden schade: als gevolg hiervan kunnen sensoren en/of camera's uit positie raken;
- voorruitvervanging: hiervoor geldt hetzelfde als voor kalibratie na schadeherstel;
- wieluitlijning: deze is direct van invloed op de werking van onder meer rijstrookassistentie, automatische noodremmen en adaptieve cruisecontrol;
- service aan onderstel/stuurinrichting/ophanging: veranderingen in de voertuiggeometrie kunnen de prestaties van sensoren negatief beïnvloeden;
- een systeemreset: deze kan de fijninstellingen van de sensoren beïnvloeden en ook inadequaat reageren op onder meer obstakels en/of rijstrookverandering kan hiervan het gevolg zijn;
- sensorvervanging: spreekt voor zich.
ADAS-kalibratieapparatuur
Bij de kalibratie is een verzameling gespecialiseerde tools nodig om ADAS nauwkeurig te kunnen afstemmen en testen.
Diagnosesoftware

Deze wordt gebruikt om gegevens te verzamelen over de status van de sensoren. Tevens biedt de software toegang tot de configuratie-instellingen van het ADAS en kan deze de informatie uitlezen die voor de kalibratie van belang is. De zogeheten OBD-II-scanners worden aangesloten op de On-Board Diagnostics (OBD)-poort van een voertuig teneinde gegevens te verzamelen en relevante foutcodes te duiden.
Fysieke kalibratiedoelen
De afmetingen en posities van deze doorgaans door de autofabrikanten voorgeschreven targets zijn cruciaal. Sommige systemen hanteren monitoren of beeldschermen. In dat geval dient er bij de afstandsmeting tot de specifiek ontwikkelde targets te worden gecompenseerd, wat ten koste kan gaan van de nauwkeurigheid. Soms worden lasers gebruikt om de juiste afstanden en hoeken te bepalen, teneinde verzekerd te zijn van een nauwkeurige sensoruitlijning en -positionering.
Kalibratieframes en -platformen
Kalibratieframes zijn structuren die op of rond het voertuig worden geplaatst en dienen als referentiepunt voor de sensorkalibratie. Ze zorgen ervoor dat de sensoren op de juiste hoogte en in de juiste hoek worden afgesteld. Geavanceerde(re) werkplaatsen maken gebruik van dynamische of mobiele kalibratieplatforms waar voertuigen kunnen worden getest terwijl ze rijden.
Kits en tools
Kalibratiekits voor camera's bevatten lenzen en optische hulpmiddelen om de camera's te testen, te kalibreren en de juiste uitlijning van de camera te waarborgen. Bij kalibratietools voor radar en LIDAR gaat het om specifieke apparatuur die gebruikmaakt van geavanceerde meettechnieken en analyses.
Simulatie- en testapparatuur
Sommige bedrijven maken bij de statische kalibratie gebruik van simulatoren om de ADAS-functies te testen en te kalibreren. Hierdoor wordt het mogelijk de voertuigprestaties te evalueren in een gecontroleerde omgeving. Bij voor kalibratiedoeleinden ontwikkelde testbankapparatuur houden specifieke tools het voertuig tijdens de kalibratie op de testbank waardoor dynamische tests mogelijk worden.
Kalibratieproces
Onderdelen die moeten worden gekalibreerd zijn de frontcamera's en -radars, de achteruitrijcamera's en de LIDAR-sensoren. Het kalibratieproces verloopt daarbij in grote lijnen analoog.

Stap 1
Er wordt gecontroleerd of het betreffende onderdeel correct is geïnstalleerd en gepositioneerd; zelfs de kleinste afwijking kan van invloed zijn op het functioneren. Er wordt ook gekeken of het betreffende onderdeel schadevrij is en geen obstructie ondervindt.
Stap 2
De daadwerkelijke kalibratie kan statisch of dynamisch van aard zijn.
- Statische kalibratie waarbij het voertuig stilstaat; fysieke kalibratiedoelen – reflecterende panelen, schermen met specifieke patronen of markeringen, rasters en meetlinialen – dienen als referentiepunten. Het ADAS-frame moet daarbij worden gepositioneerd tegenover de rijlijn van het voertuig (de symmetrielijn is geen goede referentie).
- Dynamische kalibratie waarbij het voertuig in beweging is; de sensoren en camera's worden gekalibreerd onder dynamische verkeersomstandigheden. Dit komt de nauwkeurigheid ten goede op voorwaarde dat er op het rijtraject voldoende referentiepunten aanwezig zijn. Ook dient aan bepaalde rijeigenschappen als snelheid en (stabiele) rijstijl te worden voldaan.
In beide gevallen is controle van de wieluitlijning cruciaal, zie kader. De keuze tussen statische en dynamische kalibratie is afhankelijk van het voertuig en de geïnstalleerde systemen. Beide zijn even accuraat op voorwaarde dat ze worden uitgevoerd volgens de juiste procedure.
Wieluitlijning
De wieluitlijning is bepalend voor de wiel- en stuurhoek. Gevolgen van een onjuiste uitlijning kunnen zijn: een auto die naar links of rechts trekt met alle gevolgen van dien voor zowel de veiligheid van auto en bestuurder als een juiste werking van het systeem, onnauwkeurigheid van stuurhoeksensor (de doorgegeven stuurinformatie is incorrect) en onnodige foutmeldingen, waarschuwingen of zelfs het onnodig uitschakelen van (een deel van de) functies. Omwille van de nauwkeurigheid en de efficiëntie is bij veel moderne ADAS-kalibratiesystemen de wieluitlijning een geïntegreerd onderdeel geworden van het kalibratieproces.
Stap 3
In de regel worden tijdens de kalibratie ook de software-instellingen geconfigureerd:
- de frontcamera's worden aangepast aan de kenmerken van de sensorhardware en zo ingesteld dat ze kunnen werken met specifieke voertuigen of configuraties;
- de frontradar moet worden afgestemd op de specifieke kenmerken van het voertuig en zijn omgeving;
- bij de achteruitrijcamera's worden de instellingen aangepast aan de voertuiggeometrie en aan parkeersensoren en assistentiefuncties;
- bij de LIDAR-sensoren betreft dit de afstemming van de sensor op het voertuig en andere ADAS-functionaliteiten, en optimalisatie van de dataverwerking.
Fabrikanten van ADAS-systemen kunnen aansprakelijk worden gesteld voor defecten of fouten in de systemen die tot ongelukken leiden
Stap 4
Aansluitend op de kalibratie wordt gecontroleerd of de diverse onderdelen goed werken:
- bij de frontcamera's gaat het om de controle van functies als rijstrookassistentie, adaptieve cruisecontrol en andere camera-gedreven functies;
- bij de frontradars betreft dit het controleren van functies die afhankelijk zijn van radarinput, waaronder adaptieve cruisecontrol en botswaarschuwing;
- bij de achteruitrijcamera's worden beeldweergave, helderheid en objectdetectie getest, zodat de bestuurder weet wat zich achter het voertuig bevindt en afspeelt;
- bij de LIDAR-sensor omvat dit het controleren van de afstandsmetingen, de objectdetectie en de algehele werking van de ADAS-functies die afhankelijk zijn van LIDAR-gegevens.

Remote diagnose
OEM-tools voor kalibratie zijn kostbaar, moeilijk verkrijgbaar en complex in gebruik terwijl aftermarkettools vaak onvoldoende beschikbaar of niet up-to-date zijn, zeker bij de nieuwste of de exotische(re) modellen. Remote diagnose kan in dat geval een oplossing bieden. Hierbij wordt gebruikgemaakt van telematica en gekoppelde technologieën om diagnose-informatie te verzamelen en te (laten) analyseren via het internet of andere netwerken. De organisatie die een dergelijke service levert, kan realtimeondersteuning bieden, wat vaak geen overbodige luxe is als het gaat om complexe kalibratieprocessen die specifieke expertise vereisen.

Standaardisatie
Fabrikanten kunnen aansprakelijk worden gesteld voor defecten of fouten die tot ongelukken leiden. Zorgvuldige testen en naleving van de veiligheidsvoorschriften zijn voorwaarden om systemen onder uiteenlopende omstandigheden betrouwbaar te laten functioneren. Mede om die reden zijn onder meer de International Organization for Standardization (ISO) en de Society of Automotive Engineers (SAE) druk doende standaarden te ontwikkelen voor ADAS, zoals de SAE-niveaus van autonomie (van niveau 0 tot niveau 5). Deze definiëren de mate van automatisering, van volledig handmatig rijden (niveau 0) tot volledig autonoom (niveau 5). Een dergelijke standaardisering helpt bij de ontwikkeling van innovatieve technologieën en vergemakkelijkt de acceptatie van de technologie door consumenten.
Met medewerking van Hella Benelux, Jifeline, Metalced, Snap-on Tools en TAE
