VERVANGING VAN VEROUDERDE MOTOREN VOEDT SERVOMARKT
Strenge energienormering betekent groeiruimte voor servomechanismen
De stijgende elektriciteitsprijzen en strikte gebruiksstandaarden voeden de wereldwijde vraag naar performante, energie-efficiënte motoren. Terwijl er voor Europa en de VS een stagnatie verwacht wordt wat de servomarkt betreft, liggen er nog volop mogelijkheden in Azië. Door de strikte regelgeving rond energieverbruik en milieubescherming, en de vraag om vervanging van verouderde, energie-inefficiënte motoren blijven servo's echter ook bij ons nog de nodige oplossingen bieden, en dan met name bij toepassingen met hoge snelheden/torsie.

STEEDS SNELLER, NAUWKEURIGER
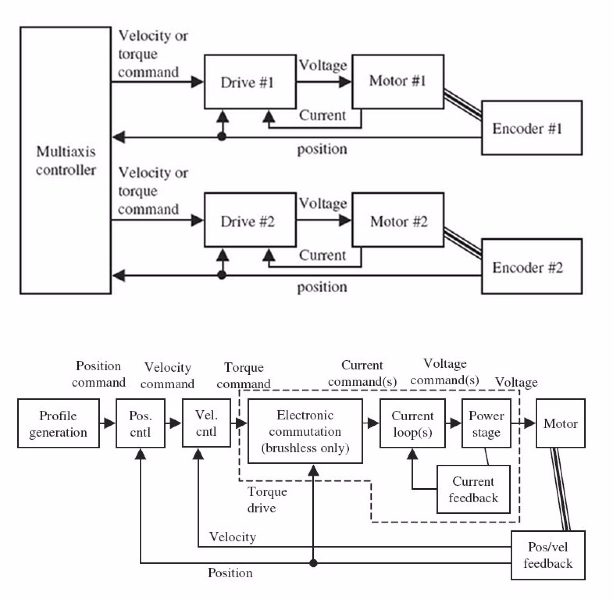
Onder druk van de globalisering is het motorontwerp geëvolueerd om te kunnen voldoen aan de kortere doorvoertijden en verstrengde eisen rond nauwkeurigheid en betrouwbaarheid ... In dat licht ontstonden de servosystemen. Servo's worden ingeschakeld daar waar actuatoren uiterst precieze of snelle bewegingen moeten uitvoeren. Door de verschillende industriële sectoren heen vind je legio voorbeelden van servotoepassingen, en bij uitstek in de automatisering. De vereiste precisie waarmee bijvoorbeeld deltapickers producten moeten plaatsen (tegen relatief hoge snelheden), kan worden behaald door middel van servomotoren in elk van de drie gewrichten. Transportbanden die producten op welbepaalde plaatsen bij bewerkingsstations moeten brengen voor afvulling, verpakking, labeling … kunnen daarvoor eveneens een beroep doen op servo's. Waar zij in hun begindagen eerder overkill betekenden, helpen servo's vandaag de efficiëntie te boosten — en dan met name in bewegingstoepassingen met variabele beladingen. Een servosysteem bestaat uit een motor, een feedbacktoestel en een controller. Samen maken die componenten het mogelijk om parameters als positie, snelheid, versnelling of torsie precies te controleren.
SERVOMOTOR
De servomotor vormt een deel van de kern van een servosysteem. De term wekt onterecht de indruk dat het een apart motortype betreft, hoewel in feite elke motor die zich leent voor een toepassing in een servosysteem, een servomotor is. In het eenvoudigste geval worden PMDC (permanente magneet DC)-motoren met borstels gebruikt vanwege hun eenvoud en lage aankoopprijs. Kleine industriële servomotoren zijn typische, elektronisch gestuurde, borstelloze motoren. Als grote industriële servomotoren worden er in vele gevallen AC-inductiemotoren gebruikt, eventueel in combinatie met een frequentieregelaar om hun snelheid te regelen. Als de beschikbare ruimte beperkt is en er hoge prestaties nodig zijn, kunnen er borstelloze PMAC (permanente magneet AC)-motoren worden toegepast.
FEEDBACK
Als feedbackmechanismes voor snelheid en/of positie komen uiteenlopende technologieën in aanmerking (encoder, potentiometer, DC-tachometer, SSI, BISS, resolver, analoge of digitale Hall, sensorless ...). Het betreft in vele gevallen een autonoom werkend fysiek toestel, mechanisch gekoppeld aan de motor. We beperken ons hier tot encoders. Een encoder geeft een bepaald aantal pulsen per omwenteling en kan, naast het toerental, ook de stand en de draairichting van de motoras aangeven. Optische encoders bestaan uit een ronde transparante schijf met streepjes die draait tussen een lichtsluis. Er bestaan ook metalen schijven met gaatjes of gleufjes. De verschillende streep- of gleufpatronen van encoders hebben te maken met het aantal posities die de schijf afgeeft. Een encoder levert in de meeste gevallen drie blokgolfsignalen; A en B, en een zogeheten indexsignaal. A en B vertonen een faseverschil van 90° ten opzichte van elkaar; waaruit afgeleid kan worden of de motor links- of rechtsom draait.
Magnetische encoders

tegenwoordig via één kabel naar de servomotor
Magnetische encoders bestaan uit een schijf van magnetisch materiaal, met bijvoorbeeld tanden en met een opnemer naast of tegenover de schijf. Door het draaien van de tanden zet de opnemer de optredende variaties in het magnetische veld om in elektrische pulsen. De pulsgenerator genereert een pulstrein waarbij de frequentie evenredig is aan het toerental van de motoras, als die direct op de as is gemonteerd. Hij kan ook op een reductiekast gemonteerd worden.
Incrementele en absolute encoders
Absolute encoders slaan hun positie op in een absolutecoördinatensysteem, terwijl een incrementele encoder incrementele veranderingen uitvoert vanaf een vooringestelde 'home'-positie. Bijgevolg vereist een incrementele encoder bijkomende elektronica (bv. een PLC of teller) om het aantal pulsen te tellen en de data om te zetten in snelheid of beweging. Een absolute encoder produceert digitale woorden die een absolute locatie identificeren. Incrementele encoders zijn eerder geschikt voor eenvoudigere, laagperformante toepassingen, absolute encoders voor complexere, kritische toepassingen met een hogere graad van controle over snelheid en positie.
Het encodersignaal wordt teruggekoppeld naar de controller die vervolgens het toerental en de positie van de motoras regelt. Zo krijg je een gesloten regelkring. Het feedbackmechanisme kan ook aanwezig, maar moeilijk te identificeren zijn. Zo gebruiken head-positioning servo's in een hardeschijfstation feedbacksignalen die ingebouwd zitten in de platter in plaats van een afzonderlijke feedbacksensor. In andere systemen worden elektrische signalen van de motor zelf gebruikt om de snelheid aan te geven. Naar die technologie wordt verwezen met de term 'sensorless'. De positie wordt echter wel degelijk 'gesensed', maar dan via intrinsieke eigenschappen van de motor in plaats van via een feedbacktoestel.
CONTROLLER

Eveneens tot de kern van de servo behoort het controllercircuit. Dat omvat gewoonlijk een motion controller (die het bewegingsprofiel van de motor genereert) en een motorversterker (die de motor van de nodige energie voorziet op basis van signalen van de motion controller). Servocontrollers voeren twee types taken uit: de opgegeven invoer opvolgen en het zogeheten 'tunen'. De meest courante tunemethode is via een PID-algoritme. Die gebruikt drie feedbacktermen (proportioneel, integrerend en differentieel) om de instelwaarde voor de positie (of snelheid) te vergelijken met de actuele waarde en geeft vervolgens de opdracht om de fout (het verschil) tussen beide te corrigeren. De termen bepalen in welke mate de servo probeert om de fout te corrigeren of te beperken tussen de instelwaarde en de actuele waarde. De proportionele term hangt af van de actuele fout, de integrerende term van een verleden fout en de differentiële term van voorspelde fouten in de toekomst.
Dedicated controllermodules
De meeste moderne servosystemen worden opgebouwd en geleverd als een 'dedicated' controllermodule van eenzelfde fabrikant. Ook kunnen er controllers ontwikkeld worden op basis van microcontrollers om de kosten voor hoogvolumetoepassingen te verminderen. Aangezien het encodertype, de tandwielverhouding en de algemene systeemdynamiek toepassingsspecifiek zijn, ligt het minder voor de hand om een algemene controller te produceren als standalone module, dus worden ze in de meeste gevallen toegepast als een deel van de hoofdcontroller.

GEINTEGREERDE SYSTEMEN
Er zijn ook servo's waarbij de encoder, versterker en controller ingebouwd zitten in de servomotor. Zo'n systeem heeft alleen een voeding nodig en een signaal om de positie door te geven. Dat laatste wordt in vele gevallen door een veldbussysteem gedaan (bv. PROFINET). Er zijn ook servosystemen met een gescheiden versterker en motor. In de servodrive zitten de controller en de eindversterker. Zo'n systeem wordt in vele gevallen door een PLC of een pc aangestuurd. Dergelijke systemen zijn courant in de machinebouw voor het snel positioneren van assen (bijvoorbeeld CNC-machines). Er zijn driefasige AC servodrivers, maar ook DC- varianten. Ook heeft dit soort drives in vele gevallen nog wat I/O-poorten aan boord voor diverse functies, die vrij te programmeren zijn. Ook frequent toegepast is een ethernet- of Profibusaansluiting om ze op afstand uit te lezen of bedienen.
DIRECT DRIVE TECHNOLOGIE
Servomotoren worden traditioneel gecombineerd met planetaire reductiekasten, wat in vele gevallen een meerprijs betekent ten opzichte van standaard-AC-motoren met tandwielkast. Ofwel is er een bijkomend koppelstuk nodig op een standaardreductiekast, met eveneens gevolgen voor de prijs (duurder) en ook voor de inbouw (groter). Bij systemen met een directe koppeling grijpt de servomotor rechtstreeks in op het eerste tandwiel van de reductiekast. Zo is een kleinere inbouwmaat mogelijk, en een lagere prijs. De directe koppeling reduceert de speling en biedt zo een performantie die kan tippen aan die van low-cost planetaire tandwielkasten (die dubbel zo duur kunnen zijn als een standaardreductiekast).
SERVOMOTOREN VERSUS STAPPENMOTOREN
De servotechnologie deelt de markt met niet-servogestuurde bewegingssystemen zoals stappenmotoren. Die laatste laten eveneens een precieze controle van bewegingen toe, maar zijn geen servo's want ze zijn gebaseerd op het openkringprincipe. Een servomotor gebruikt enkel energie om naar de opgegeven positie te roteren, maar rust vervolgens. Stappenmotoren blijven energie gebruiken, zodra die positie bereikt is. Servomotoren worden doorgaans gebruikt als een hoogperformant alternatief voor de stappenmotor. Stappenmotoren hebben door hun opbouw al de eigenschap om een positie te behouden, aangezien ze ingebouwde outputstappen hebben. Daardoor zijn ze in vele situaties inzetbaar voor een openluspositiecontrole, zonder feedback encoder, want hun drivesignaal specificeert het aantal te roteren bewegingsstappen. Om dat te kunnen, moet de controller natuurlijk wel de positie van de stappenmotor bij de opstart kennen. Daarom moet de controller bij de eerste opstart de stappenmotor activeren en die naar een bekende positie brengen, waar hij dan bijvoorbeeld een eindschakelaar activeert. Denk daarbij aan het aanschakelen van een inkjetprinter; waarbij de controller de patronendrager eerst volledig naar links en rechts beweegt om de eindposities vast te leggen.
 Een servomotor met een absolute encoder (duurder dan sin/cos of resolver) zal zich daarentegen meteen naar de positie begeven die de controller opdraagt, ongeacht de beginpositie bij de opstart. Standaardstappenmotoren hebben een inherente beperking in hun prestaties, aangezien dergelijke motoren enkel een last kunnen aandrijven die voldoende ruim binnen hun lastbereik ligt. Anders kunnen er bij overgeslagen stappen door overbelasting positiefouten optreden, waardoor het systeem moet worden herstart of geherkalibreerd. Wel bestaat de mogelijkheid van geslotenkringstappenmotoren (closed loop stepper motors). Die gedragen zich als servomotoren, maar vertonen softwarematig bepaalde verschillen voor vloeiende bewegingen. De voornaamste fabrikanten van dergelijke systemen passen magnetische encoders toe als feedbacktoestel vanwege de lage kost en de hoge trillingsweerstand. Het voornaamste voordeel van een geslotenkringstappenmotor is de prestatie-prijsverhouding. Bovendien hoeft de PID-controller niet getuned te worden in een geslotenkringstappersysteem. Vele toepassingen, zoals lasersnijmachines, worden aangeboden in twee prijsklassen. De lageprijsklasse omvat dan de stappenmotoren, de hogeprijsklasse de servomotoren.
Een servomotor met een absolute encoder (duurder dan sin/cos of resolver) zal zich daarentegen meteen naar de positie begeven die de controller opdraagt, ongeacht de beginpositie bij de opstart. Standaardstappenmotoren hebben een inherente beperking in hun prestaties, aangezien dergelijke motoren enkel een last kunnen aandrijven die voldoende ruim binnen hun lastbereik ligt. Anders kunnen er bij overgeslagen stappen door overbelasting positiefouten optreden, waardoor het systeem moet worden herstart of geherkalibreerd. Wel bestaat de mogelijkheid van geslotenkringstappenmotoren (closed loop stepper motors). Die gedragen zich als servomotoren, maar vertonen softwarematig bepaalde verschillen voor vloeiende bewegingen. De voornaamste fabrikanten van dergelijke systemen passen magnetische encoders toe als feedbacktoestel vanwege de lage kost en de hoge trillingsweerstand. Het voornaamste voordeel van een geslotenkringstappenmotor is de prestatie-prijsverhouding. Bovendien hoeft de PID-controller niet getuned te worden in een geslotenkringstappersysteem. Vele toepassingen, zoals lasersnijmachines, worden aangeboden in twee prijsklassen. De lageprijsklasse omvat dan de stappenmotoren, de hogeprijsklasse de servomotoren.
DECENTRALE SERVOAANDRIJVING

Traditioneel worden elektrische componenten en bedrading binnen de schakelkast gemonteerd, waardoor ze beschermd zitten. Al die componenten in één kast insluiten kan echter tijds- en ruimterovend zijn. Voor bepaalde motioncontroltoepassingen zoals verpakkingsmachines en draaitafels moeten servoaandrijvingen ondergebracht worden buiten de schakelkast. Machinebouwers zoeken echter steeds meer naar oplossingen met decentrale servoaandrijvingen. Met het toenemende aantal toegepaste assen in geautomatiseerde machines bieden decentrale servo-aandrijvingen namelijk verschillende voordelen:
Ruimtebesparend, minder bedrading
Een decentrale topografie van servoaandrijvingen (montage buiten de schakelkast) houdt in dat een kleinere behuizing kan volstaan. De hoeveelheid kabels kan beperkt worden door middel van seriële 'daisy chaining' van de aandrijvingen met een hybride kabel voor stroom, sturing en communicatiesignalen.
Eenvoudig en energie-efficiënt ontwerp

Ook het machineontwerp wordt eenvoudiger dankzij het modulaire karakter van decentrale servoaandrijvingen. Extra assen zijn eenvoudig toe te voegen door een duplicatie van de schematische tekeningen van andere assen. Dat brengt een inkorting van engineeringstijd en -kosten, vereenvoudigt het assemblageproces en versnelt de time-to-market.
Een bijkomend voordeel is dat de servo-aandrijvingen voor stroomtoevoer op een gemeenschappelijke DC-bus zijn aangesloten, zodat het systeem remenergie kan absorberen en herverdelen over de andere servoaandrijvingsmodules, in plaats van die verloren te laten gaan in de vorm van warmte via externe weerstanden. In bepaalde cases kunnen weerstanden dan zelfs volledig weggelaten worden of kunnen kleinere weerstanden volstaan.
