Stappenmotoren veelzijdig & kostenefficiënt
Steeds fijner en beter werken met borstelloze synchrone elektromotor
Met steeds meer toepassingen in robotica en pick-and-place maakt de stappenmotor furore in de automatisatiesector. Zijn veelal eenvoudige sturing en mogelijk houdkoppel spelen in zijn voordeel, maar vooral de kostenefficiëntie van de stappenmotor is een grote plus. Motion Control geeft u de ins & outs van deze soort motor.
Zo werkt een stappenmotor
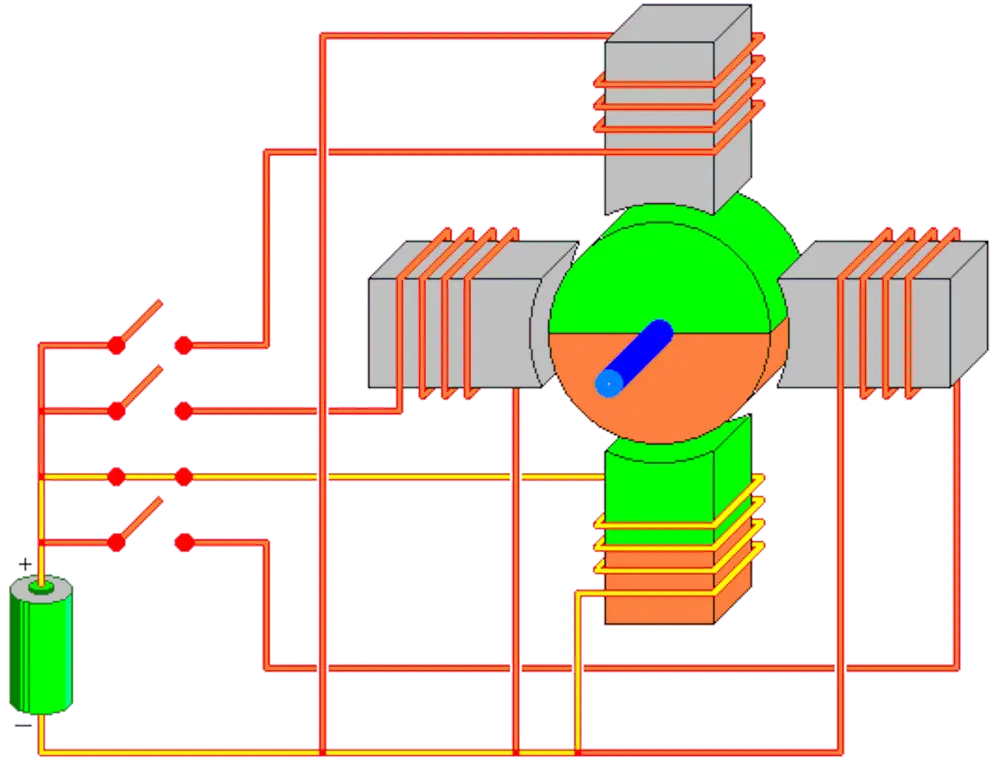
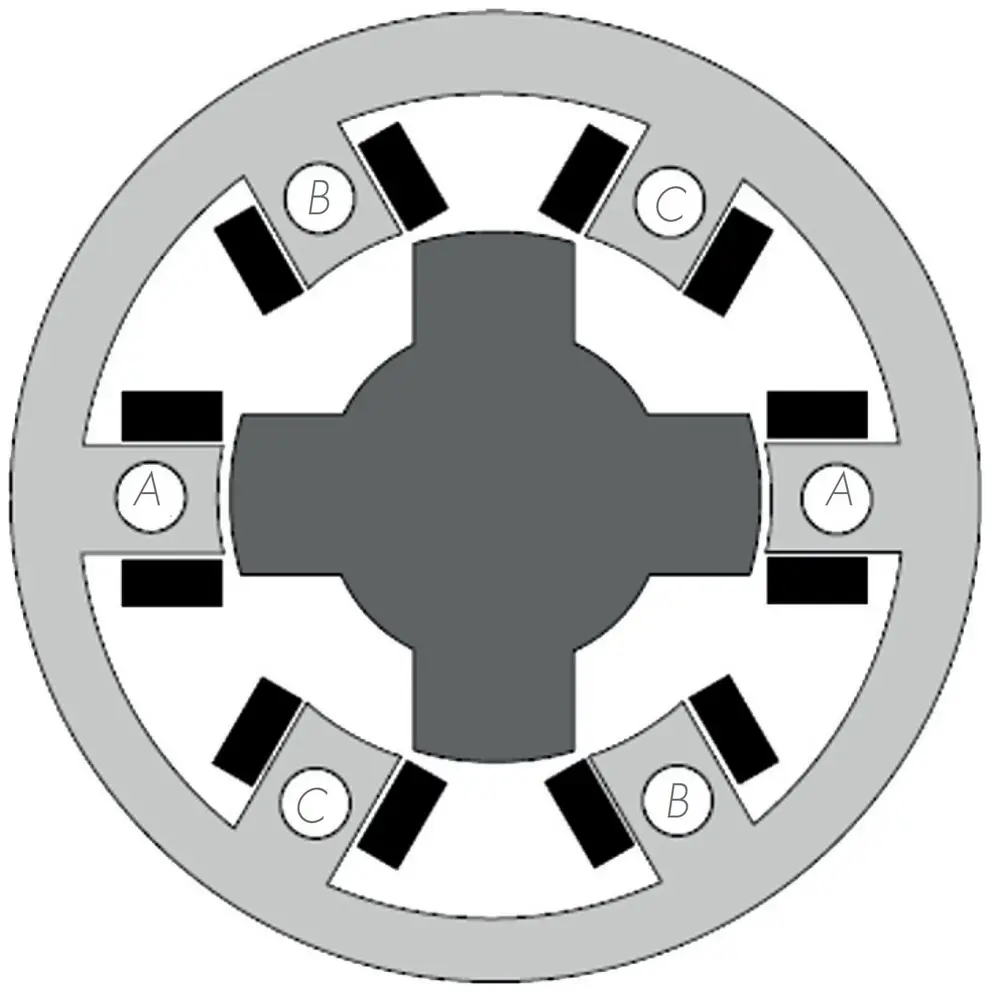
Het werkingsprincipe van een stappenmotor - lid van de (borstelloze) synchrone elektromotorenfamilie - valt het best uit te leggen in combinatie met een vereenvoudigde opbouwtekening. Rudimentair bestaat de stappenmotor uit een rotor en een stator met daarop de spoelen. Met het activeren van één of meer statorfasen creëert de stroom in de spoelen een magnetisch veld. De rotor zal zich richting dit veld bewegen. Het variëren van de snelheid van pulsen regelt ook de snelheid van de stappenmotor, met behoud van nauwkeurigheid.

Met het activeren van de verschillende fases na elkaar, verplaatst de rotor zich het gevraagde aantal stappen en bereikt zo de gewenste positie. Deze hoekverdraaiing, die met een aandrijfpuls wordt verwezenlijkt, is gekend (courant is 1,8 of 0,9°) en dus weet men ook op voorhand exact hoeveel hoekverdraaiing 1 stap betekent. Voor een volledige omwenteling - met 1,8° hoekverdraaiing - zijn dus 200 impulsen nodig. Dat omrekenen werkt ook in omgekeerde richting: het tellen van het aantal uitgevoerde stappen geeft ook de exacte hoekpositie van de as weer. Meting met terugkoppeling is dus overbodig.
Voor- en nadelen
Betaalbare kracht
Eén van de opmerkelijkste pluspunten van een stappenmotor is zijn hoog koppel bij zeer lage toerentallen, wat hem zeer geschikt maakt voor positioneertoepassingen. Dit koppel kan zelfs ingezet worden als rem (holding torque).
Eenvoud is de andere pro van een stappenmotor. De - in standaardversie - eenvoudige opbouw maakt van deze motor niet enkel een robuuste, maar meteen ook een heel prijstechnisch interessante oplossing.
Piekbelasting
De keerzijde van de stappenmotor is dat elke beweging onderverdeeld is in stappen. Een vloeiende beweging ontbreekt, waardoor telkens een piekbelasting optreedt. Die kan op zijn beurt dan weer trillingen en/of geluidsoverlast veroorzaken.
RESONANTIE
Elke installatie - en ook (stappen)motor - heeft haar eigen, specifieke resonantiefrequentie. Als de stapfrequentie in de buurt komt van die resonantiefrequentie heeft dat hoorbare gevolgen (luider draaien van de motor) maar ook 'onzichtbare' gevolgen zoals trillingen.
De resonantiefrequentie is afhankelijk van de belasting en snelheid van de applicatie, maar ligt in theorie altijd ergens tussen 100 en 250 stappen per seconde.
In bepaalde gevallen kan het benaderen van de resonantiefrequentie zelfs het overslaan van stappen veroorzaken. Dit kan opgelost worden met een kleine aanpassing van de step rate of toepassen van microstepping.
INDELING STAPPENMOTOREN
Om stappenmotoren in te delen, gebruiken we de types (opbouw), de aanstuursystemen (werkingsprincipes) en de windingen op de statorspoelen. We bespreken ze allen in de volgende hoofdstukken.
TYPES
Op de markt zijn er drie types stappenmotoren: stappenmotor met permanentmagneet, met reluctantie of een hybride vorm.

Permanentmagneet
Stappenmotoren met permanentmagneet verkrijgen beweging door een magneet die bekrachtigd wordt. De puls zal de rotor (permanentmagneet, met zuid- en noordkant) doen bewegen richting de op dat moment bekrachtigde fase. Hoe groter het aantal polen in de stator, hoe hoger de stapresolutie. Door de beperkte omtrek van de rotor zijn er ook maar een beperkt aantal polen mogelijk. Dit beperkt ook het aantal onderverdelingen per omwenteling.
RELUCTantie
Stappenmotoren op basis van (variabele) reluctantie maken ook gebruik van magnetisme, maar op een andere manier. Hier gaat de rotor zich naar de plaats met de minste reluctantie (magnetische weerstand) bewegen. Een puls vermindert dus de magnetismeweerstand van een fase, waardoor de stap wordt gemaakt om de rotor weer perfect te aligneren met de statortanden. Kenmerkend voor dit soort stappenmotor is dat ze getande rotor en stator hebben, geen houdkoppel bieden bij uitschakelen en een relatief laag draaikoppel leveren.
Hybride
Hybride stappenmotoren combineren eigenschappen van de beide types. Zo is de stator getand terwijl de rotor magnetisch én getand is. In de langste richting is een permanentmagneet geplaatst (voor voormagnetisering), maar de noord- en zuidkant zijn met een halve tandsteek verdraaid. Rotatie gebeurt door het reluctantieprincipe, waarbij de rotor streeft naar de meest gunstige situatie. Hybride stappenmotoren hebben een houdkoppel, een goed rendement en zijn minder vaatbaar voor resonantieproblemen.
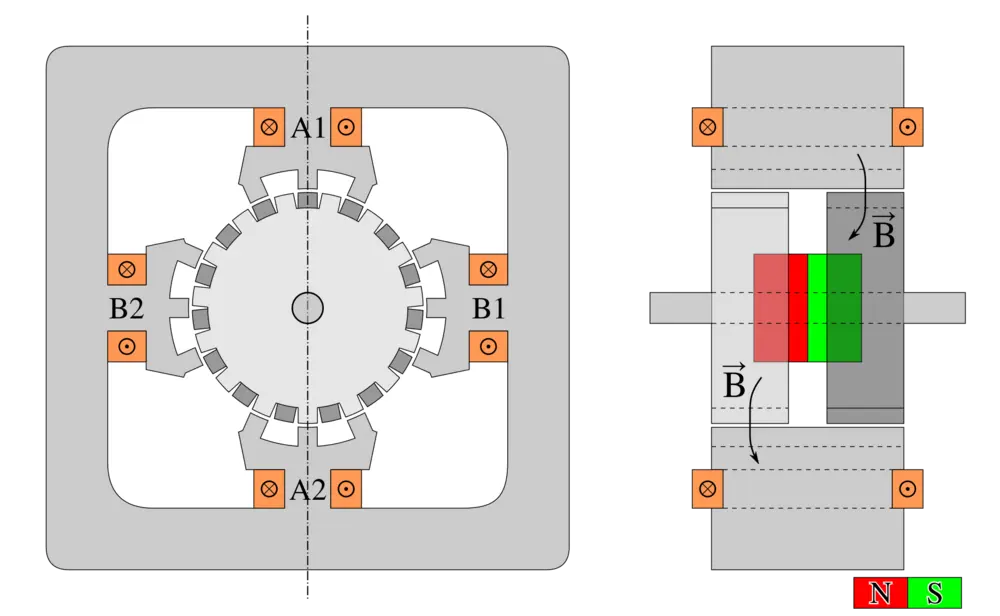
Een hybride stappenmotor combineert permanentmagneet met reluctantieprincipes
STURING
Stappenmotoren kunnen meerdere werkingsprincipes hanteren, waarbij de sturing en de indeling van de stappen het verschil maakt. We onderscheiden full step, half step en microstep.
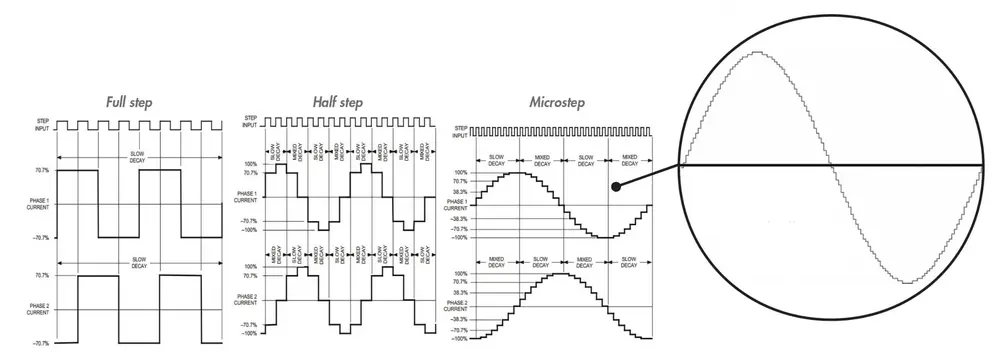
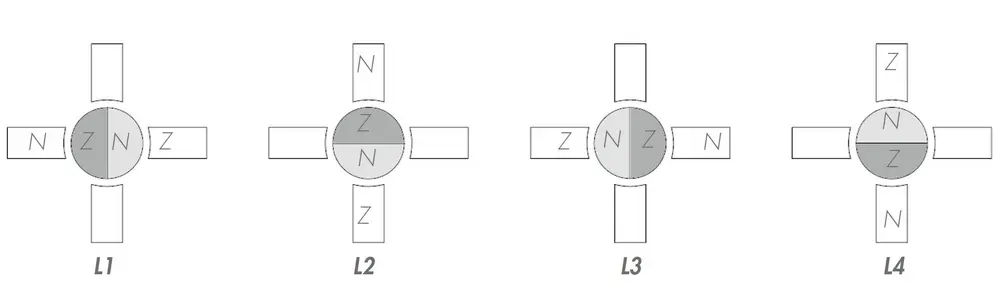
Full step
Bij full step zet de rotor volledige stappen omdat de fases een na een worden aangestuurd.
Half step
Bij half step wordt - zoals de benaming al verraadt - de stap gehalveerd omdat voortdurend een en twee fases worden aangestuurd. De kleinere stapgrootte zorgt voor minder lawaai en trillingen.
Microstepping
Micro stepping zet men in wanneer de voordelen van een stappenmotor gewenst zijn, maar de onderverdeling in (gehalveerde) stappen te bruut is voor de toepassing. Deze techniek verdeelt elke stap in kleinere stapjes. Met gebruik van getrapte (microsteps) sinusvormige golven worden ook kleinere pulsen omgezet in beweging. Zo kan een oorspronkelijke stap van 1,8° onderverdeeld worden in bv. 64 stappen van 0,028°. Kleinere stappen resulteren in minder trillingen en lawaai.
Windingen
Naast het type en de sturing heeft ook de uitvoering van de windingen op de statorspoelen een invloed op de werking, want deze bepaalt hoe aansluitingen moeten worden gemaakt. We kunnen hier twee principes onderscheiden: unipolair of bipolair.
Unipolair
Bij unipolaire stappenmotoren zijn er per circuit twee wikkelingen met elk een middenaftakking ('common' genoemd). Er zijn dus zes aansluitdraden. De commons zijn altijd verbonden met de voedingsspanning. Deze relatief eenvoudige manier van sturing verliest in de praktijk stelselmatig terrein.
Bipolair
Bij bipolaire stappenmotoren ontbreekt de common. De twee wikkelingen beschikken dus niet over een middenaftakking waardoor er slechts vier aansluitingen zijn. De vereiste sturing is hier iets complexer omdat de stroom in beide richtingen door de wikkeling gestuurd wordt, maar daar staat tegenover dat het koppel maximaal kan ingezet worden.
BELANGRIJKE TERMEN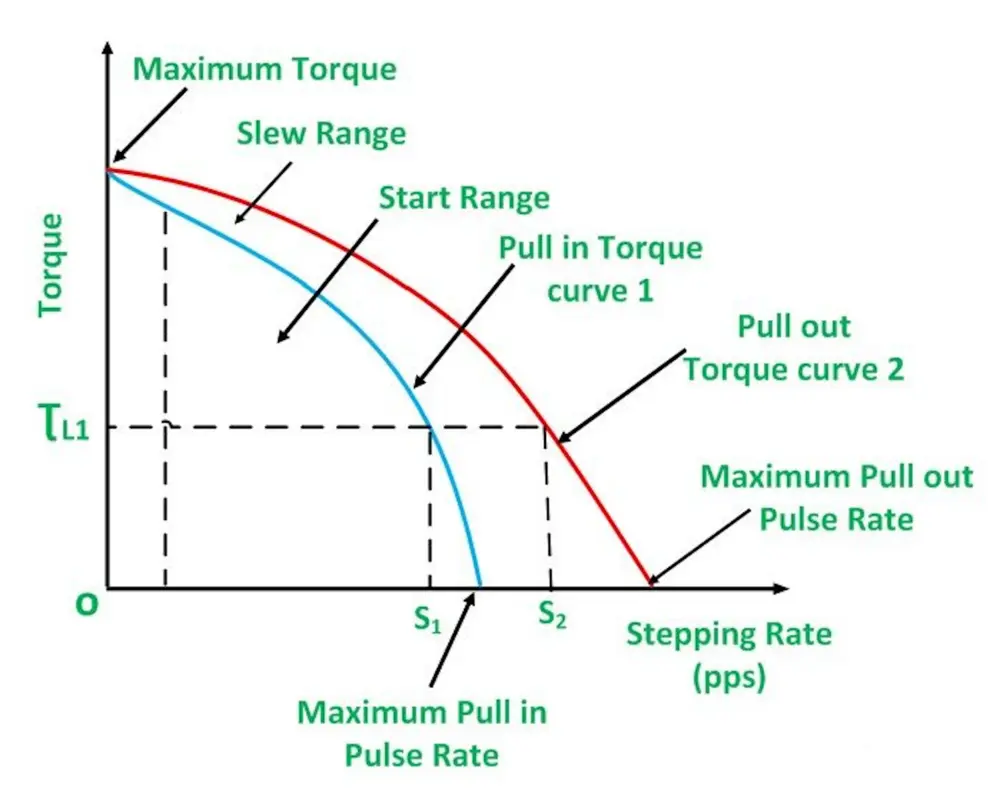 • Detent torque: Het koppel dat de motor nodig heeft om de rotor te verdraaien in stroomloze toestand. Dit koppel heeft wel een koppelrimpel tot gevolg bij een draaiende stappenmotor. Reluctantiemotoren beschikken niet over dit koppel.
• Detent torque: Het koppel dat de motor nodig heeft om de rotor te verdraaien in stroomloze toestand. Dit koppel heeft wel een koppelrimpel tot gevolg bij een draaiende stappenmotor. Reluctantiemotoren beschikken niet over dit koppel.
• Holding torque: Het maximum koppel waarmee men de as van een bekrachtigde motor kan belasten zonder dat deze zijn positie verliest.
• Pull-in torque: Het gebied onder de Pull-in waarin de steppermotor direct kan starten en stoppen zonder stappen verlies. Uit de kromme kan worden afgelezen bij welke maximale frequentie (snelheid) de motor gestart kan worden zonder een stap over te slaan.
• Pull-out torque: Buiten deze lijn dreigt de motor stappen over te slaan. De motor kan in ‘stall’ mode gaan. De maximale frequentie mag niet overschreden worden.
• Slew Region: Het gebied tussen pull in torque en pull out torque en dus het gebied waar men geen stap verlies heeft door te weinig of te veel puls.

