Selective Compliance Articulated Robot ARM (SCARA)
 SCARA robots zagen het levenslicht 17 jaar na de invoering van de eerste industriële robot. Een volledig nieuw concept specifiek ontworpen voor een bepaalde tak van toepassingen. Waarom was deze nieuwe ontwikkeling nodig? Waarom wordt deze nog steeds gebruikt? En heeft deze nog een toekomst?
SCARA robots zagen het levenslicht 17 jaar na de invoering van de eerste industriële robot. Een volledig nieuw concept specifiek ontworpen voor een bepaalde tak van toepassingen. Waarom was deze nieuwe ontwikkeling nodig? Waarom wordt deze nog steeds gebruikt? En heeft deze nog een toekomst?
Minimale configuratie, maximaal werkbereik
We schrijven 1961, het jaar waarin de eerste industriële robot ingezet werd in een industriële productieomgeving. In 1978 kwam SCARA op de markt, een nieuw robottype met een specifieke configuratie die een alternatief moest bieden voor de bestaande assemblagetoepassingen. De ontwerpeisen van de SCARA waren eenvoudig: de robot moest met een minimaal aantal assen de mogelijkheid bieden om producten op te pikken en op een andere locatie neer te zetten. Complexe manipulatie is in zo’n context overbodig. Aan de basis van het nieuwe type robot ligt een observatie gemaakt door de Japanse professor Makino. In een manuele assemblagelijn waren 80% van de bewegingen lineair en vielen binnen een werkbereik gelijkaardig aan dat van de menselijke arm.
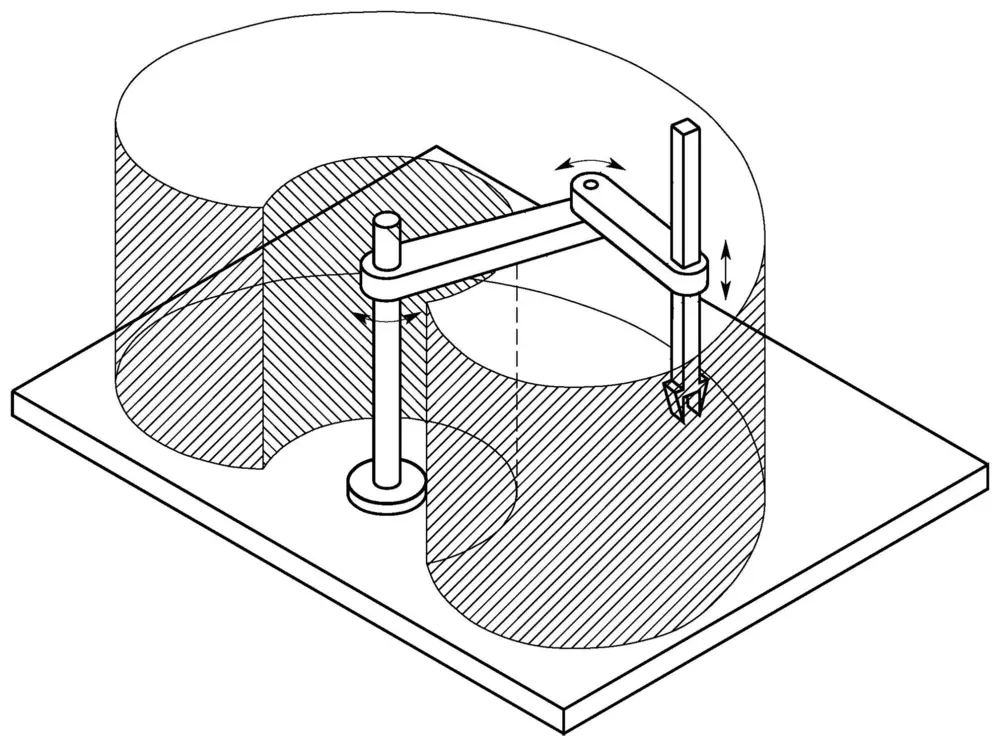
De oplossing lag dus in het nabootsen van de beweging van de menselijke arm in een horizontaal vlak. Twee vrijheidsgraden/assen zijn hiervoor nodig: een schouder en een elleboog die elk een analoog van de onderarm en bovenarm kunnen bewegen. Daarnaast moet er een derde as voorzien worden die de verticale beweging uitvoert voor het oppikken en neerzetten van objecten, de pols. Voor de eenvoud is dit dan typisch een lineaire as met een klein bereik.
In sommige gevallen bleek het ook nodig te zijn dat de objecten onder een bepaalde oriëntatie opgepikt en neergezet konden worden. In het bijzonder voor de assemblage van asymmetrische onderdelen. Een vierde as wordt dan soms voorzien in de pols die een oriëntatie kan voorzien rond de loodrechte op het vlak. Een minimale configuratie (3 tot 4 assen) wordt zo bekomen met een maximaal werkbereik en performantie voor de toepassingen die de robot voor ogen houdt.

What’s in a name?
De SCARA configuratie resulteert in een typerende eigenschap die in vele gevallen voordelen biedt. SCARA betekent voluit ‘Selective Compliance Articulated Robot Arm’. Articulated wijst op het feit dat het om een robotarm gaat met rotatieve gewrichten (derde as buiten beschouwing gelaten) zoals een seriële robot. Wat de SCARA echt speciaal maakt, schuilt in het eerste deel van zijn naam: ‘Selective Compliance’, ofwel selectieve soepelheid. Hoe groter de soepelheid van iets, hoe meer bepaalde krachten het kunnen vervormen. Soepelheid is het tegenovergestelde van stijfheid. Elke robot heeft een selectieve stijfheid/soepelheid, variërend afhankelijk van de as. Bij een standaard 6‑assige robot roteren de assen in allerhande richtingen ten opzichte van elkaar. Hierdoor varieert de soepelheid voortdurend volgens de robotbewegingen. Bij de SCARA zijn de XY-richtingen soepeler dan de Z‑richting omdat de assen van de XY‑motoren parallel met de Z-as staan. In de XY-richting treedt een soepelheid op doordat in de assen een zekere flexibiliteit zit ten gevolge van de overbrenging tussen de motor en de arm. Een grote soepelheid in de XY‑richting kan ook bekomen worden door de motoren niet te bekrachtigen. In sommige toepassingen kan dat een groot voordeel zijn.
TYPES en Bouw
Serieel
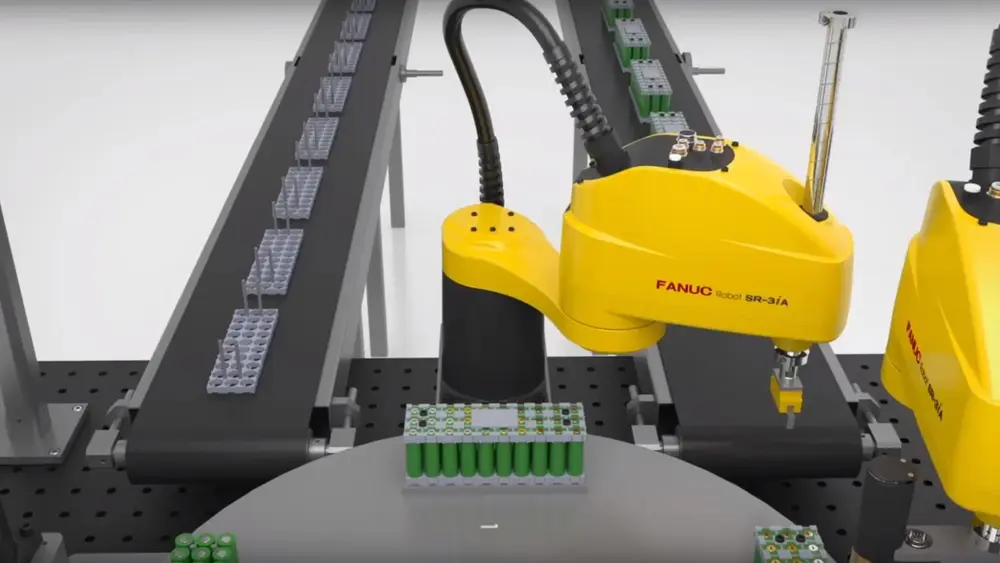
De meeste SCARA’s worden serieel uitgevoerd. Dit wil zeggen dat de assen elkaar opvolgen. De schouder, elleboog en pols hebben dan elk een motor. Elke motor ‘draagt’ dus ook de navolgende motoren zoals bij klassieke gebouwde seriële robots met 5 tot 7 vrijheidsgraden. De motor van de schouder wordt dan typisch wat groter uitgevoerd omdat deze ook de navolgende structuur en motoren moet bewegen. Deze moet echter meer koppel kunnen genereren, omdat deze een grotere inertie ‘ziet’, om aan vergelijkbare snelheden van de elleboog motor te kunnen versnellen.
Parallel
Naast de seriële uitvoeringen bestaan ook enkele parallelle uitvoeringen. De zogenaamde dubbel-armige SCARA’s hebben typisch nog een grotere snelheid en nauwkeurigheid (typisch een repeteerbaarheid van ca. 5 µm. Deze robots kunnen vergeleken worden met twee menselijke armen die elkaar met de handen vasthouden. De hogere snelheid is te wijten aan het feit dat de motoren voor de X- en Y-beweging in de basis geplaatst worden. De X- en Y-positie in het vlak wordt dan bepaald door het mechanisme gevormd door beide armen en een gecoördineerde beweging van beide motoren. Er is geen motor meer nodig in de elleboog. Dit zorgt voor een lichtere structuur. Eenzelfde motor in de schouder van de robot kan een grotere versnelling realiseren, waardoor de robot veel sneller kan bewegen. Daarmee gaat een hogere nauwkeurigheid gepaard. Bij seriële configuraties worden de positioneerfouten van de eerste motor (schouder) geaccumuleerd met de positioneerfout van de tweede (elleboog). Bij parallelle configuraties is dat niet het geval omdat beide motoren zich vast in de basis bevinden. Ook is de constructie stijver. Het grootste nadeel van de parallel toegepaste SCARA is dat de aansturing veel complexer is. Die moet ervoor zorgen dat beide armen niet botsen. Daarnaast is het bij deze configuratie niet zo eenvoudig om de armen uit de werkruimte te verplaatsen wanneer de operator moet ingrijpen.
Aantal assen
De meeste SCARA’s worden geleverd met vier assen, doorgaans X, Y, Z en U genoemd. De vierde en laatste as laat dan een rotatie rond de verticale as toe waardoor objecten onder de juiste oriëntatie in het vlak kunnen opgepikt en neergezet worden. Daarnaast bestaan er ook nog steeds versies met slechts drie assen, waar dus geen rotatie van het object rond de verticale as mogelijk is. Deze modellen worden typisch ingezet wanneer het gereedschap dat op de laatste (Z) as geplaatst wordt geen rotatie in het vlak nodig heeft. Denk maar aan een SCARA met een schroevendraaier op de Z-as. Bij dergelijke toepassingen is de vierde as compleet overbodig aangezien de schroevendraaier de rotatie voor zich neemt.
Wanneer een vijfde as nodig is, wat het geval kan zijn wanneer ook een oriëntatie uit het vlak moet gegeven worden aan het object, wordt deze in de meeste gevallen als een toegevoegde as gemonteerd omdat 5-assige SCARA’s niet standaard voorradig zijn. De eerste en tweede as van de SCARA zijn tegenwoordig altijd voorzien van een elektrische servomotor. De derde (Z-as) werd vroeger in bepaalde gevallen uitgevoerd met een pneumatische cilinder. Nu wordt die derde as altijd elektrisch uitgevoerd, zo kan de verticale beweging over het volledige bereik van de as nauwkeurig gepositioneerd worden.
Doorgaans wordt de SCARA staand geïmplementeerd. Versies voor wand- of dakmontage kunnen voordelen bieden omdat producten er onderdoor kunnen gaan en er geen hinder is van de basis van de robot.
Bereik en draagvermogen
Niet alle robotfabrikanten bieden SCARA’s aan, terwijl andere net volop focussen op dat robottype. Zo is er toch een groot gamma aan groottes en draagvermogens beschikbaar. Het draagvermogen kan variëren van 1 tot 20 kg terwijl armlengtes kunnen variëren van 170 tot 1.000 mm. Het werkgebied van de SCARA is typisch beperkt tot wat zich voor de robotbasis bevindt. De SCARA wordt meestal staand opgesteld. Er zijn daarnaast ook robots op de markt met een as die kan doordraaien voor een volledig cilindrisch werkbereik. Deze rotational SCARA wordt dan typisch hangend opgesteld en werd uitgebracht om een antwoord te bieden op de Deltarobots. Een dergelijke SCARA kan compacter ingebouwd worden, is zeer nauwkeurig, heeft een groter draagvermogen en heeft een veel groter en perfect cilindrisch werkgebied. Daarnaast slijt de constructie niet en is de kost ook aanzienlijk lager dan die van Deltarobots, met een grote werkruimte.
Voordelen van SCARA
Nauwkeurig en onderhoudsvrij
Bij een 6‑assige robot wordt de nauwkeurigheid van de positie van het object/gereedschap bepaald door de nauwkeurigheid van elk van de assen/gewrichten. Hoe meer assen in serie staan, hoe meer deze fout geaccumuleerd wordt. Aangezien een SCARA slechts twee opeenvolgende assen heeft, blijft die fout beperkt. Een SCARA heeft zo doorgaans een grote repeteerbaarheid en nauwkeurigheid.
Redelijke stijfheid, minimale inertie
De bouw van de robot laat toe een redelijke stijfheid te realiseren met een minimale inertie. Daarnaast moeten slechts een beperkt aantal motoren meegedragen worden tijdens de beweging. De schouder draagt twee of drie motoren, de elleboog draag er een of twee. De lage inertie en het lage gewicht maken snelle/sterk versnelde bewegingen in de XY-richting mogelijk. SCARA’s hebben dus typisch zeer korte cyclustijden.
Prijs
De SCARA is qua prijs heel competitief met Deltarobots en seriële robots.
Werkbereik
Groot ten opzichte van de voetafdruk in vergelijking met Deltarobots.
Eenvoudige programmering
De ontkoppeling van de XY-beweging (twee motoren in planaire configuratie) en de Z‑beweging maakt dat de robot eenvoudig en intuïtief te programmeren is. Daarnaast laat het ‘twee-link’ concept zich zeer eenvoudig programmeren omdat de robot zeer intuïtief beweegt en een sterke analogie vertoont met hoe de menselijke arm in een vlak beweegt.
Hoge stijfheid in Z-richting
Maakt dat SCARA’s kunnen ingezet worden voor toepassingen waar perskracht nodig is, denk maar aan het perspassen van assen in lagers. Zo kan een tot 200 N perskracht geleverd worden zonder schade.
Selectieve soepelheid
Wanneer de XY‑motoren niet bekrachtigd worden is de robot soepel in de XY-richting terwijl dit niets afdoet van de grote stijfheid in de Z-richting. Dit kan zeer handig zijn voor ‘pen in gat’ of perstoepassingen. Tijdens het zakken van de Z-as worden dan typisch de XY-motoren uitgezet terwijl de encoders bekrachtigd blijven. De soepelheid in de XY-richting is dan ideaal om tolerantiefouten passief te compenseren, vooral wanneer de onderdelen van een afschuining voorzien zijn.

Nadelen van SCARA
Beperkt aantal vrijheidsgraden
Wanneer bijvoorbeeld complexe manipulatie van het werkstuk/object nodig is (bijvoorbeeld rotatie uit het vlak) moeten extra assen voorzien worden.
Z-as doorgaans traagste as
Daarnaast moet deze ook vier keer bewegen in één cyclus terwijl de X- en Y-assen slechts twee keer moeten bewegen. Dat limiteert het bereik van de Z-as. Daarnaast wordt de grootste nauwkeurigheid van de SCARA uit de X- en Y-beweging gehaald. Wanneer in de Z‑richting over grote afstanden bewogen wordt, ondervindt deze as meer buiging ten gevolge van proceskrachten. Hierdoor daalt de nauwkeurigheid. Het bereik van de Z-as moet dus beperkt worden, wat in sommige toepassingen een nadeel kan zijn.
TOEPASSINGEN
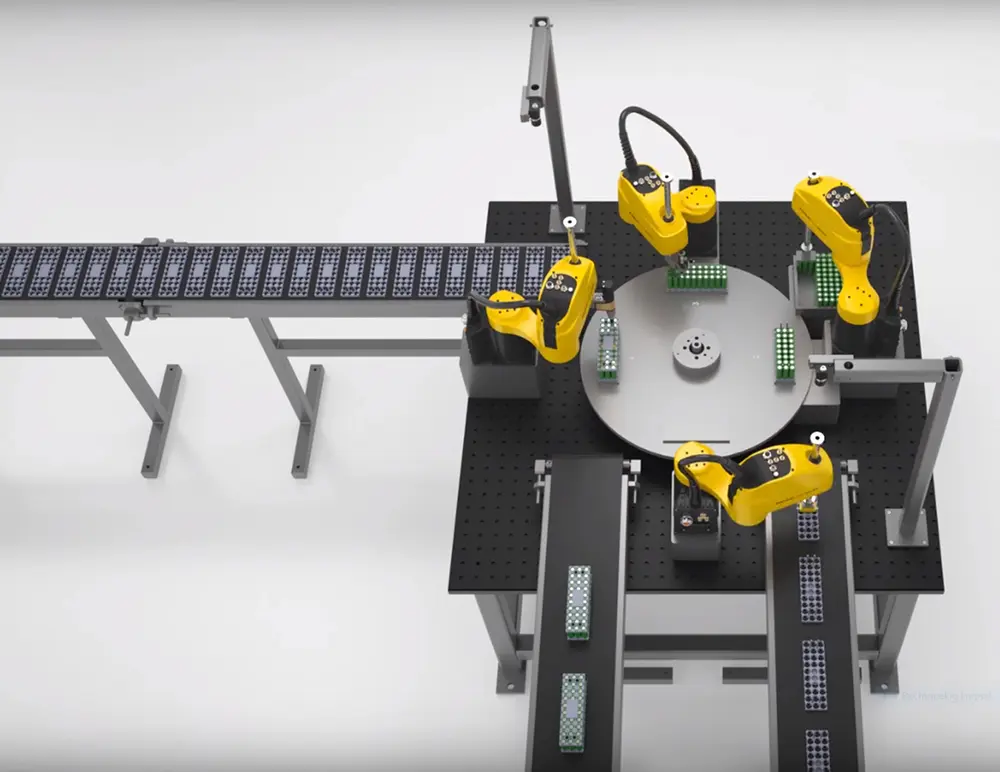
SCARA’s zijn ontworpen als assemblagerobots waar de montagerichting steeds in het vlak ligt. Doorgaans worden SCARA’s dan ook ingezet voor de assemblage van bijvoorbeeld elektronica, kunststofspuitgietonderdelen, connectoren, schakelaars en stopcontacten, ruitenwissers, sensoren, medische onderdelen zoals contactlenzen en anticonceptiemiddelen, ledverlichting … Daarnaast worden SCARA’s ook ingezet voor verpakken, pick and place, materiaalbehandeling, labelen en voor het uitvoeren van kwaliteitscontroles. Ze worden doorgaans minder ingezet in toepassingen waar snelle en nauwkeurige verplaatsingen in de verticale richting nodig zijn.
KEUZECRITERIA
Bij het kiezen voor een SCARA moet men enkele vragen in acht nemen. Zijn de werkruimte en het draagvermogen voldoende groot? Zijn 3 of 4 assen genoeg voor de bedoelde toepassing? Is er geen grote verplaatsing in de Z-richting nodig? Welke is de gewenste cyclustijd en repeteerbaarheid?